
Overview
ADS-B is an air traffic surveillance technology that enables aircraft to be accurately tracked by air traffic controllers and other pilots without the need for conventional radar.
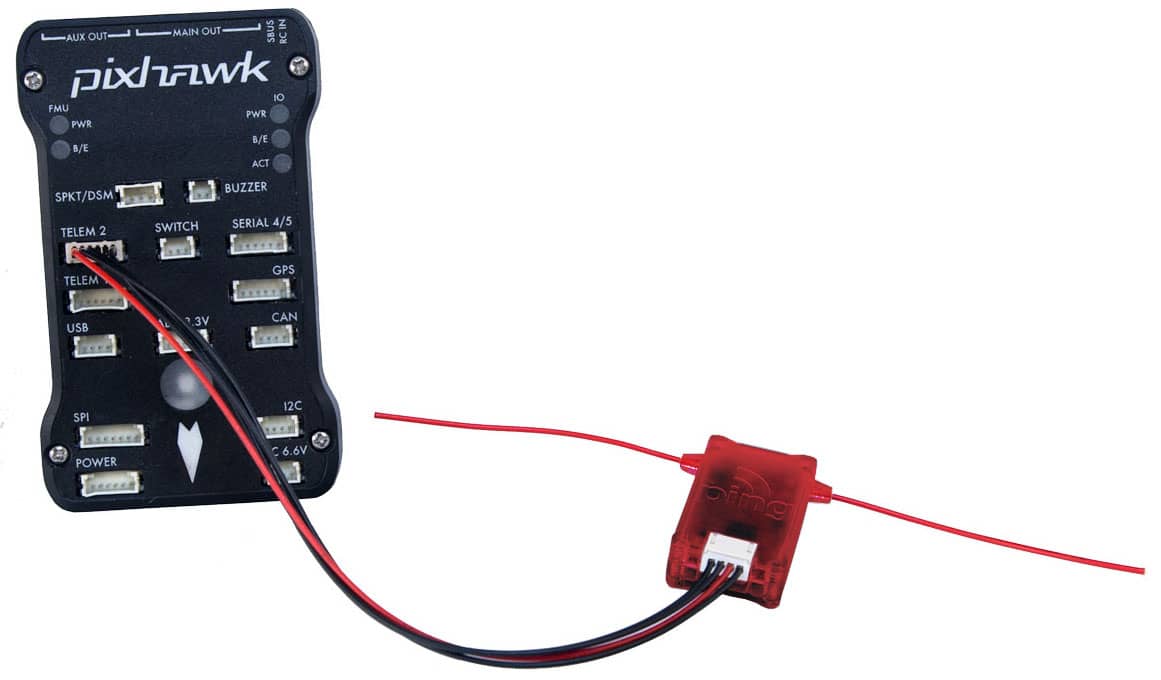
This article explains how to attach and configure a MAVLink based ADS-B receiver by uAvionix called PING™. Please visit their website for technical specs including RF characteristics and connector pinout.

This first implementation only supports Plane. Object avoidance is only active in AUTO mode.
Connection to flight controller
The ADSB receiver comes with a DF13 serial cable that can be plugged directly into a Pixhawk serial port.
The Ping sensor should be mounted so that the antenna is oriented vertically.
Setup through the ground station
The key parameters that control the ADS-B packet parsing and object avoidance behavior options.
- ADSB_ENABLE – set to “1” to enable ADSB
- ADSB_BEHAVIOR (see below)
Once operational aircraft within about 50km should appear on the ground station map.

To test the systems you can compare with flights shown on flighradar24.com.
The data is transmitted via the ADSB_VEHICLE message. When received by ArduPilot, it is forwarded on to all MAVLink serial ports meaning that if you have a GCS or companion computer connected it will receive the forwarded packets automatically.
Serial Setup
If you are using one of the UARTs on your board which default to MAVLink then the default settings will work fine for the Ping. Alternatively you can connect the Ping to one of the other UARTs, such as the GPS UART (if it is unused) or the serial4/5 UART. In that case you will need to configure the uart as MAVLink at a baudrate of 57600.
For example, if you wanted to use the port marked “serial4/5” on a Pixhawk you would set:
- SERIAL4_PROTOCOL to 1 (meaning MAVLink)
- SERIAL4_BAUD 57 (meaning 57600)
You will need to reboot your board after making those changes.
Vehicle Database
When enabled, the ADS-B library will store information for up to 25 vehicles detected by the ADS-B receiver. Due to some experimental work in other features, such as EKF2, available RAM may be limited. It is important to note that when ADS-B is disabled (ADSB_ENABLE=0) then the memory is released, effectively freeing up about 1KB of RAM. When enabled, the detected vehicle list is checked once per second for potential conflicts.
Vehicle detection and behavior
The current ADS-B library is not considered to be fully-featured, more of a proof of concept. It is not intended to be used as-is for realistic object avoidance. More work is needed to make it a robust tool for avoiding in a practical way.
Current behavior is to check the detected vehicle list once per second and determine if any other aircraft is within 200m. The altitude is ignored. At that point, a behavior is performed in an effort to avoid it. The behavior persists until no vehicles are within 400m.
Object avoidance behavior is dictated by one of three different ADSB_BEHAVIOR options:
- ADSB_BEHAVIOR=0, NONE. Objects are detected and the GCS is notified but no action is taken.
- ADSB_BEHAVIOR=1, LOITER. If another vehicle is nearby, switch from AUTO to LOITER mode. When the vehicle leaves, switch back to AUTO and resume.
- ADSB_BEHAVIOR=2, LOITER_AND_DESCEND. Same as (1) but decrease the altitude 1 m/s. If the other vehicle location persists, you will eventually loiter into the ground.
Simulation
This includes a new ADS-B simulation component in SITL where you can have aircraft flying at you. Joy! To enable this you must have pymavlink v1.1.70. If you have an older version, use:
sudo pip install --upgrade pymavlink MAVProxy
When starting SITL use the following command:
sim_vehicle.sh -A --adsb --console --map
This also supports plugging in a hardware ADS-B receiver to your computer using a USB-to-Serial converter which will overlay real ADS-B traffic into the simulation.
TODO
- Altitude is ignored so if a plane flies over at 35000′ but within 200m horizontally, then yes you’ll consider it a threat right now. Obviously that needs to change.
- Automatically switching from LOITER to AUTO mode behavior can get goofy if you switch the modes externally while actively avoiding another vehicle. That is, AUTO -> LOITER -> AUTO works fine if only the ADS-B logic is doing the mode switching.
- Add Copter vehicle avoidance behaviour (currently only reads data from sensor and forwards to ground station)
- Add more complicated behaviors
- Add realistic threat detection by calculating the vehicle’s trajectory and computing a time-to-impact rather than a simple radius distance.
- Add visualization to GCS
- This implementation was intentionally simple to promote others to enhance it to suit their/everyones’ needs. The limited number of params was simply to get the device driver rolling without committing to any particular param name.
Questions, issues, and suggestions about this page can be raised on the APM Forum. Issues and suggestions may be posted on the forums or the Github Issue Tracker.